cs188课堂笔记
劈里啪啦
Search Problems
- A search problem consists of:
- A state space
- A successor function(with actions, costs)
- A start state and a goal test
- A solution is a sequence of actions (a plan) which transforms the start state to a goal state
- The world state includes every last detail of the environment.
- A search state keeps only the details needed for planning(abstraction)
Problem:Pathing
States:(x,y)location
Actions:NSEW
Successor:update location only
Goal test:is(x,y) = END
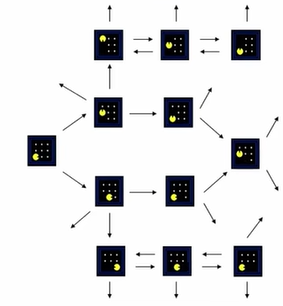
Problem: Eat-All-Dots
States:{(x,y),dot booleans}
Actions:NSEW
Successor:update location and possibly a dot boolean
Goal test:dots all falseState space graph
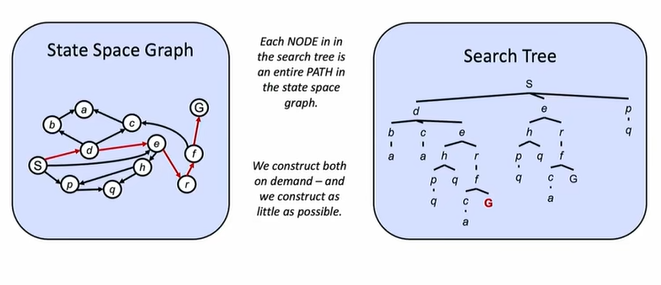
A mathematical representation of a search problem
- Nodes are (abstracted) world configurations
- Arcs represent successors(action results)
- The goal test is a set of goal nodes(maybe only one)
In a state space graph, each state occurs only once
Search Trees
- A “what if” tree of plans and their outcomes
- The start state is the root node
- Children correspond to successors
- Nodes show states, but correspond to PLANS that achieve those states
- For most problems, we can never actually build the whole tree
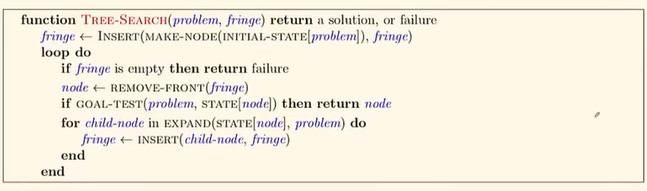
Searching with a Search Tree
- Expand out potential plans(tree nodes)
- Maintain a fringe of partial plans under consideration
- Try to expand as few tree nodes as possible
DFS
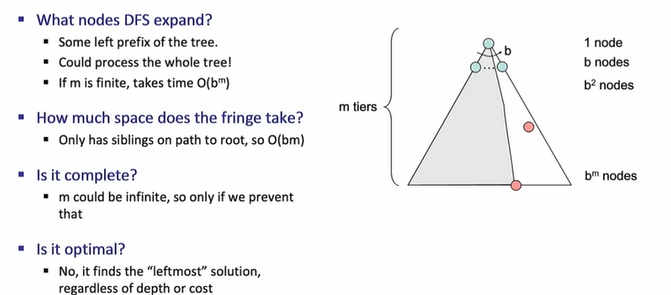
先进后出,扩展最后加入边缘的那个节点
在实现中一般使用stack即栈存储探索过的节点,再pop选择下一个扩展的节点,同时栈符合先进后出的原则,故使用栈
BFS
先进先出,在边缘等待时间最长的节点会优先被扩展
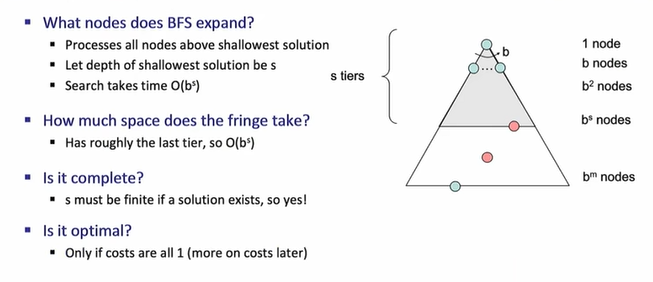
使用queue即队列存储探索过的节点
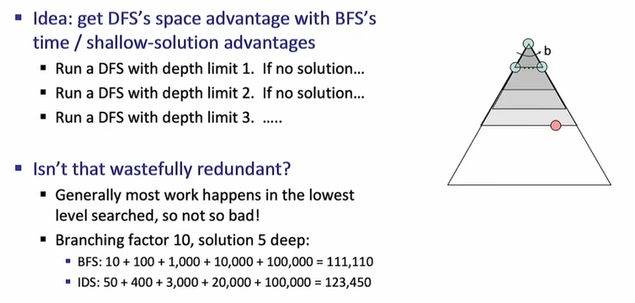
Iterative Deepening
Uniform Cost Search(Dijkstra)
不再遵循先进后出或先进先出的原则,而是按照当前最小代价进行扩展
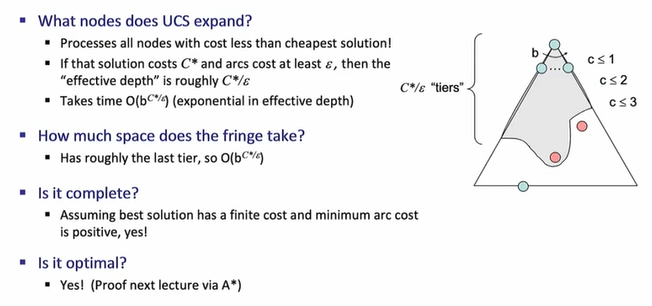
Remember:UCS explores increasing cost contours
The good:UCS is complete and optimal
The bad:
- Explores options in every “direction”
- No information about goal location
Greedy Best-First Search
贪婪算法直接向目标所在方向寻找,可能在有障碍物的情况下无法找到代价最小的路,或找不到路
A* Search
- Uniform-cost orders by path cost, or backward cost g(n)
- Greedy orders by goal proximity,or forward cost h(n)
- A* Search orders by the sum: f(n) = g(n) + h(n)
一个可接受的代价函数的特质:低估从给定状态到达目标的成本
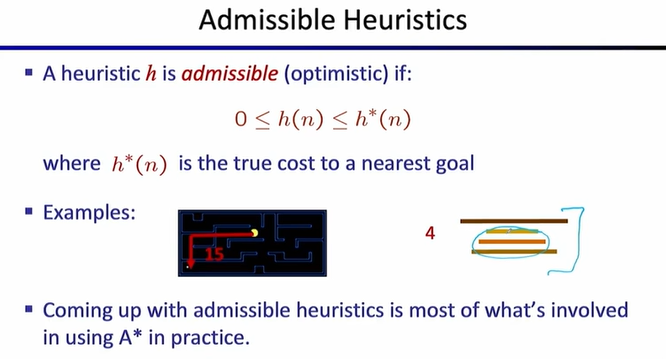
总结一个好的启发式函数的特征:
- 可采纳 当且仅当对于每个节点n,h(n)都不会高估从n到目标的实际最小代价
- 一致性
当且仅当对于每个节点n及其任意后续节点m,满足三角不等式
数学表达: h(n) ≤ c(n,m) + h(m) c(n,m):从n到m的实际代价 h(m):后续节点的启发式值
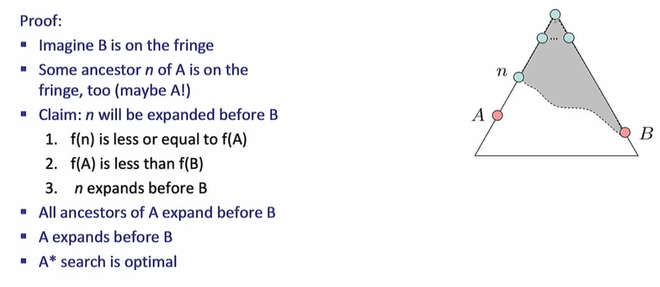
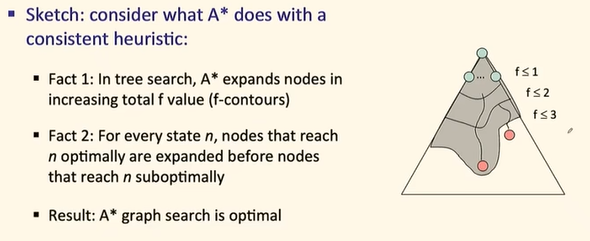
证明a星可以找到最优路径
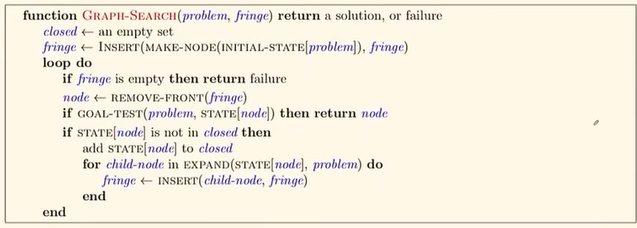
Graph Search
每拓展一个新的点就把该点加入探索过的点集合中,之后不再拓展以该点结尾的路径
A* Search plus Graph Search
Local search

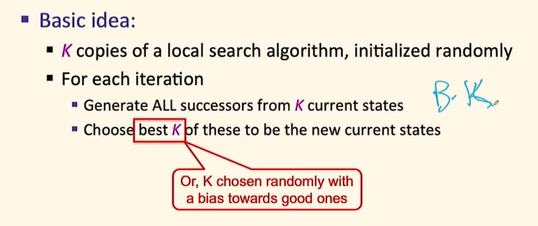
局部搜索的general idea
- Start wherever
- Repeat move to the best neighboring state
- If no neighbors better than current,quit
容易陷入局部最优,可通过引入在陷入局部最优时随机移动的方法来摆脱局部最优,但允许随机移动的次数难以选择
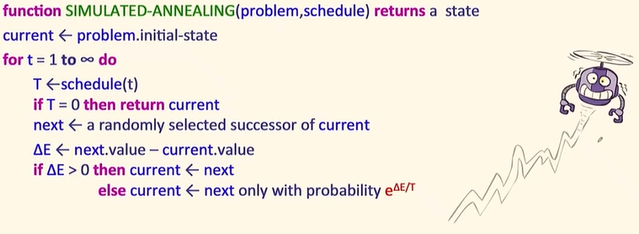
方案一 退火算法
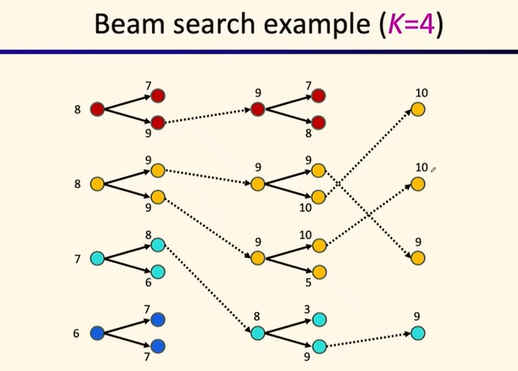
方案二 束搜索